1.Назначение, задачи и общая
характеристика ГАР.
Под
ГАР понимается получение информации путем приема и анализа акустических
сигналов инфразвукового, звукового, ультразвукового диапазонов,
распространяющихся в водной среде от надводных и подводных объектов.
ГАР включает в себя:
·
Разведку шумовых
полей работающих гребных винтов и механизмов НК и ПЛ;
·
Добывание
информации в изображениях дна и объектов из принимаемых отраженных сигналов;
·
Параметрическую
разведку (X, Y, V и др.)
объектов, содержащуюся в принимаемых в принимаемых сигналах;
·
Разведку
сигналов, создаваемых средствами сооружения НК и ПЛ;
·
Разведку звуковой
связи;
ГАР делится на активные (гидролокатора) и пассивные
(шумопеленгаторы) средства.
Задачи решаемые ГАР:
1. Определение параметров первичных шумовых полей
объектов для выделения классификационных принципов.
2. Определение параметров излучения активных
гидроакустических средств для организации
гидроакустического подавления.
3. Определение развития гидроакустической техники.
4. Оопределение гидролокационных характеристик объектов и вооружения.
5. Картографирование рельефа дна и конструкции подводных
сооружений.
6. Выявление дислокации ВМФ.
7. Выявление подводных стартов ракет и торпед,
определение их мест глубины и количества.
Основными характеристиками аппаратуры ГАР являются:
·
рабочая частота;
·
акустическая
мощность;
·
ширина ДНА
акустической антенны;
·
диапазон рабочих
частот;
Существо
перечисленных характеристик не отличается от соответствующих характеристик
средств РЛС.
При оценке возможностей ГАР возможную роль
играют пространственно- временные характеристики среды:
- распределение температуры и солености воды;
- гидростатическое давление;
- отражающие свойства морской поверхности и дна;
На
дальность действия аппаратуры ГАР кроме того, влияют :
- отражающая способность цели (сила цели);
- уровень шумового излучения;
- взаимное расположение аппаратуры и цели;
- уровень акустических помех.
2.Принципы построения гидролокаторов.
В
морской среде распространяются акустические волны вследствие объемной упругости
среды. Процессы распространения описываются лучевой теорией. Скорость звука в
океане близка к 1500 м/с и зависит от
трех параметров to, солености и
гидроакустического давления. Звуковая волна может испытывать затухание,
отражение и преломление на границе, реверберацию (многократное отражение от
поверхностей), рефракцию. Физическая модель канала учитывает обе границы с
неоднородностями границы и среды и представляется при расчетах в виде линейного
фильтра с переменными параметрами. Вид этого канала показан на рис.1
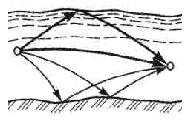
Рис.1 Модель
гидроакустического канала
Гидроакустическое поле в точке приема
является результатом прямых и отраженных сигналов:
![]() ,
,
где N – число
лучей; ai – амплитуда; ti – задержка iго сигнала; n(t) – помеха.
Движение
источника и приемника вызывает смещение сигнала по оси частот за счет эффекта
Доплера.
Обобщенная структурная схема
гидролокатора показана на рис.2
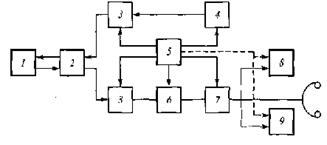
Рис.2
Обобщенная структурная схема гидролокатора.
1. приемоизлучающая акустическая антенна,
2. коммутатор,
3. матрицы формирования ДНА
4. генератор,
5. синхронизатор,
6. блок компрессии динамического диапазона и нормирования
сигнала,
7. схема обработки сигнала,
8. схема выявления наличия сигнала,
9. индикатор.
В гидролокаторе используют импульсные простые и сложные (ЛЧМ)
сигналы, а также сигналы с непрерывным излучением и ЧМ в зависимости от
решаемых задач.
Сигнал,
выработанный генератором, поступает на матрицу, с помощью которой формируется
лепесток ДНА нужной ширины и направления. Аналогичным образом и на прием.
Однако в общем случае ДН трактов передачи и приема отличается.
Блок
компрессии обеспечивает с одной стороны реализацию широкого динамического
диапазона, с другой примерно постоянный уровень сигнала на экране во времени и
пространстве, а также устраняет вариацию помех при постоянстве порога (РЛТ
~const). ВАРУ, АРУ , режекторный, полосовой адапторы. Возможна когерентная и некогерентная обработка.
Часто совместно используется слуховая и зрительная информация. Слуховая обеспечивает частотное разделение сигнала и
реверберации.
Принципы действия ГА
и РЭС имеют много общего и отличаются в основном только антеннами.
ГА
антенны – устройство обеспечивающее
пространственно-избирательное излучение или прием звука в водной среде. Она
состоит из электроакустических преобразователей, акустических экранов, несущей
конструкции и электрокоммуникаций.
Типичные преобразователи показаны на рис.3
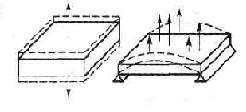
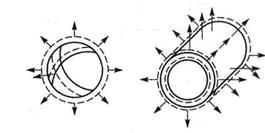
Рис.3
Типовые колебательные системы.
Это колебательные системы. Они могут быть
пьезоэлектрические, электромагнитные, электростатические и другие различной
формы.
При гидролокации применяют различные
способы обзора пространства. Наиболее эффективным является способ, при котором
пространство облучается вращающимся с постоянной скоростью лепестком ДНА. А для
приема используют многоканальный тракт со статически сформированными лепестками
ДНА, равномерно перекрывающими весь горизонт или спектр обзора излучения
(рис.4).
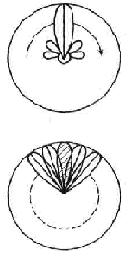
Рис.4 Способ
обзора пространства.
Такой способ обзора исключает потери
энергии сигнала. Неизбежные при сканировании,
позволяет сузить полосу пропускания, что делает тракт более помехоустойчивым.
Для измерения дальности применяют в
основном импульсный метод, когда эхо-сигнал имеет вид:
![]() , где
, где ![]() - время
распространения сигнала туда и обратно.
- время
распространения сигнала туда и обратно.
Возможен частотный метод дальнометрии, основанный на приеме непрерывных ЧМ
колебаний.
Для определения угловых координат
подводных целей применяют амплитудный фазовый, фазово-амплитудный,
равносигнальной зоны и корреляционный метод пеленгования. В многопозиционных
системах используют триангуляционный, разностно-дальномерный, угломерный и
дальномерный методы пеленгования.
3.Принципы построения шумопеленгаторов.
ШП
служат для обнаружения и прослушивания шумовых сигналов различного
происхождения и определения направления на источник. Обработка сигналов
существенно отличается от обработки при гидролокации.
Обобщенная структурная схема
шумопеленгатора показана на рис.5
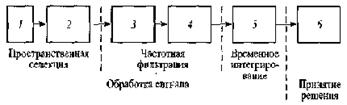
Рис.5 Обобщенная структурная схема
шумопеленгатора.
1. – антенна;
2. – матрица формирования ДН;
3. – полосовой фильтр;
4. – детектор;
5. – осреднитель;
6. – оператор или вычислительное
устройтво;
На
вход системы поступают выборки, носящие вероятностный характер. Часть выборок
содержит только шумы-помехи, часть – смесь шумов цели и помех. В ходе обработки
определяют и сопоставляют функции распределения вероятностей наличия обеих этих
частей. При определенном соотношении этих вероятностей, превышающем порог,
делается вывод об обнаружении полезного сигнала.
Обычно используют групповые акустические
антенны из большого числа приемников, образующих плоскостную или
пространственную решетку разной конфигурации. Управление положением ДН
обеспечивается временными задержкам в приемниках.
Каждый приемник может участвовать в формировании нескольких лепестков.
Шумопеленгатор с веером статическисформированных
лепестков ДН показан на рис.6. Здесь 1-приемники; 2-входные цеи;
3-регистры сдвига; 4-фильтры; 5-детекторы; 6-выходныецепи.
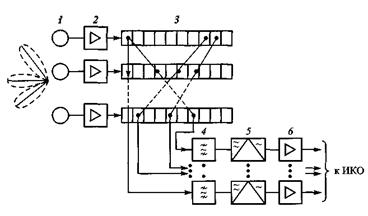
Рис.6
Принцип формирования лепестков ДН с применением элементов цифровой техники
Основными
тактическими показателями ШП являются:
-
максимальная дальность обнаружения, которая меняется в широких пределах и
составляет для современных станций от нескольких единиц до сотен километров;
-
точность пеленгования, составляющая от десятых долей до 1...2°;
-
разрешающая способность по направлению;
-
помехоустойчивость;
-
надежность;
-
степень автоматизации работы станции. Основные технические параметры:
-
диапазон рабочих частот;
-
ширина ДН и коэффициент осевой концентрации антенны;
-
полосы пропускания диапазонов;
-
коэффициент усиления приемного тракта.