1. Угломерный,
угломерно-дальномерный и разностно-дальномерный методы определения
местоположения источников радиоизлучений.
1.1 Общая характеристика методов.
В зависимости от параметра
электромагнитного поля, используемого при определении местоположения РЭС,
различают: амплитудные, временные, фазовые и частотные методы. По измеряемым
параметрам электромагнитного поля могут быть определены геометрические величины: пеленг, расстояние до РЭС, разность
расстояний от РЭС до двух точек приема.
Измеренным геометрическим величинам
соответствуют линии положения РЭС на
плоскости (ЛП) или поверхности положения
(ПП) в пространстве.
Форма ЛП или ПП и определяющие их
соотношения зависят от метода определения местоположения (МП) (рис.1).
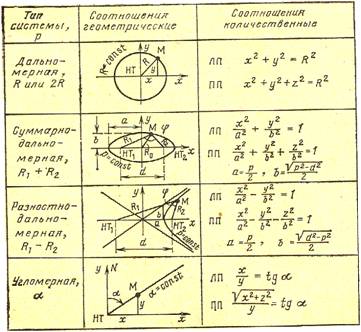
Рис.1
Формы и соотношения для линий и поверхностей
положения.
Например,
для дальномерной системы: М – источник ИРИ (РЭС); О1 – средство
разведки (навигационная точка НТ) ; геометрическая постоянная
P = R = const.
ЛП: х2 + у2 = R2 –
концентрическая окружность с центром в НТ.
ПП: х2 + у2 + Z2 + R2 – сфера
с центром в НТ.
Определение: Геометрическое
место точек возможного положения РЭС на плоскости ( в пространстве), для
которых геометрическая величина, определяющая местоположение объекта, есть
постоянная, называется линией ( поверхностью) положения.
Для
однозначного определения МП необходимо, чтобы в области нахождения РЭС
пересекалось не менее 2х линий или не менее трех поверхностей
положения (одна из которых, поверхность
Земли).
В настоящее время применяются следующие
методы определения МП излучающих РЭС: угломерный, разностно-дальномерный,
суммарно-дальномерный, угломерно-дальномерный, дальномерный, комбинированный.
Рассмотрим некоторые из них.
1.2 Угломерный (пеленгационный) метод основан на определении МП, как точки пересечения ЛП,
соответствующих измеренным в двух разнесенных точках приема пеленгами (рис.2).
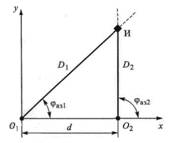
Рис.2
Угломерный метод определения местоположения ИРИ на плоскости.
Для определения МП «и» на плоскости
достаточно измерить jаз1 и jаз2. Тогда
по теореме синусов:
![]() ;
;
![]() ;
;
где d – база,
о1 и о2 – точки приема (НТ)
Для определения МП «и» в пространстве
(рис.3) измеряются азимутальные углы jаз1 jаз2 и угол
места в одной из точек приема. Либо наоборот – углы места jум1 и jум2 в двух
точках приема и азимут в одной из них.
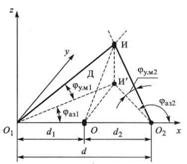
Рис.3
Угломерный метод определения местоположения ИРИ в пространстве.
Тогда, например:
![]()
Важнейшей оценкой, определяющей выбор
способа определения МП, является погрешность измерений. Однако
непосредственному измерению в аппаратуре подвергаются электрические параметры с
характерной для данной системы погрешностью.
Погрешности связаны следующей функциональной цепочкой:
sэ®sр®sл®sД,
где sэ – ошибка
определения электрического параметра;
sр – ошибка
определения геометрического параметра;
sл - ошибка определения ЛП (ПП);
sД - ошибка определения МП.
Ошибки
определения линейного и геометрического параметров связаны соотношением:
sлр = Клsр, где Кл
– коэффициент линейной ошибки (определяется выбранным методом определения МП).
Например, для угломерного метода
(плоскостной случай):
![]()
Для
рассматриваемого рисунка Д=Д1, а ![]() - ошибка определения
угла.
- ошибка определения
угла.
Она
связана с ошибкой определения электрического параметра, например, фазы. В свою
очередь ![]()
![]()
Анализ показывает, что наибольшая
точность определения МП будет при a @ 110о и расположению РЭС на нормали к
середине базы при относительно небольших Д.
Наихудшая точность соответствует направлениям
на РЭС, близким к направлению базы.
Точность определения МП может быть
увеличена при многократном пеленговании (10-15 пеленгов), но при этом возникает
опасность ложных пеленгов (рис.4)

Рис.4 Возникновение ложных пеленгов
Здесь наряду с определением 3х
истинных источников И1, И2,
И3 обнаруживается 6 ложных (ЛИ).
Исключение ЛП возможно за счет
опознавания источников путем сравнения по параметрам сигналов (f, tu, Tu),
либо путем взаимокорреляционной обработки сигналов, принимаемых в о1,
о2.
Достоинства
метода – простота.
Недостатки
метода – необходимость согласования обзора из 2х точек
и зависимость ошибок от положения
источника.
1.3 Разностно-дальномерный метод основан на измерении относительного
запаздывания сигналов, принимаемых в 3х пунктах приема, и
нахождении ЛП (гипербол), а также вычислении координат точки пересечения ЛП
(рис.5)
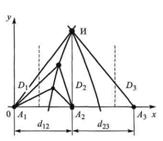
Рис.5 Разностно-дальномерный
способ определения местоположения
Здесь А1, А2, А3
–разнесенные точки наблюдения, принадлежащие различным базам А1, А2,
d12 и А2,
А3, d23. Фокусы гипербол совпадают с точками наблюдения.
Разности расстояний, определяемые путем измерения относительного запаздывания
сигналов, будут:
P12=const=Д1-Д2 и P23=const=Д2-Д3 .
Они
являются параметрами гипербол, по которым гиперболы строятся. (Гипербола –
геометрическое место точек, для каждой из которых разность расстояний до
фокусов есть величина постоянная (рис.1)
Пространственное положения источника
ЭМИ определяется по трем разностям дальностей, измеренных в 3х,
4х приемных пунктах. МП источника ЭМИ – точка пересечения
трех гиперболоидов вращения.
Линейная ошибка метода:
![]() , где
, где ![]() - СКО определения Р.
- СКО определения Р.
В свою очередь; ![]()
j - угол под которым видна база А1 А2 из точки И
Обычно базы (А1А2) и
(А2А3) располагаются не на одной линии а под a=60о-90о
Для определения временных задержек Dt12 и Dt23
используют, например, передний фронт импульса сигнала РЭС.
Для
уменьшения sЛ базу нужно увеличивать. Точность определения МП данным
методом высокая (десятки м).
Рассматриваемый метод применяется в
пассивных импульсных (временных) и корреляционно-базовых системах определения
местоположения источников ЭМИ.
При использовании пассивных
разностно-дальномерных систем также возможно обнаружение ложных несуществующих
источников ЭМИ в тех случаях, когда источник излучает периодические сигналы с
малым периодом следования (с малой скважностью). На временном интервале, равном
разности времени распространения сигнала от источника до приемника, укладывается
несколько периодов излучаемых сигналов.
В результате система измеряет большое
количество разностей дальностей и определяет соответственно большое количество
гиперболических поверхностей. Многие из них являются ложными.
Устранить подобную неоднозначность можно
путем разнесения источников по угловым координатам, т.е. совместным применением
разностно-дальномерного и триангуляционного методов.
Помимо рассмотренных находят
применение комбинации методов: угломерно-дальномерный
и угломерно-разностно-дальномерный (рис.6,7).
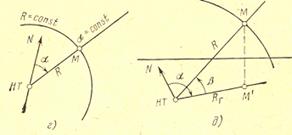
Рис.6
Дальномерно-угломерный способ
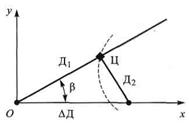
Рис.7 Угломерно-разностно-дальномерный
способ
2.
Погрешность определения местоположения источника
радиоизлучения
Установим связь между ошибкой олределения
МП и линейными ошибкам, справедливую для
любого метода (рис.8)
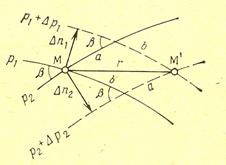
Рис.8 Определение
ошибки местоположения
Здесь Р1 и Р2
истинные ЛП для геометрических параметров Р1 и Р2,
Р1+DР1 и Р2+DР2 – ЛП измеренные, отстоящие от истинных
на величины линейных ошибок Dn1 и Dn2; М – истинное МП
объекта, М¢ - найденное (измеренное); r – ошибка МП объекта.
Из DМОМ¢ можно найти:
r2=a2 + в2 ± 2ав cosb, где ![]() ,
, ![]() .
.
Тогда  .
.
Переходя к СКО и полагая измерения ЛП Р1 и Р2 некоррелированными получим:  .
.
Здесь ![]() - дисперсии ошибок
определения линий положения.
- дисперсии ошибок
определения линий положения.
Вывод: для любых методов при заданных линейных ошибках ![]() - ошибка МП sД
минимальна при b=90о.
- ошибка МП sД
минимальна при b=90о.
В РРТР широко распространены угломерный
и угломерно-дальномерный методы, как единственные методы, позволяющие
однозначно определять МП.
Недостатком угломерного метода
является зависимость ошибки МП от дальности и сравнительно большие значения
ошибок.
В последнее время все чаще используется гиперболический
метод. Его достоинства:
- Высокая точность определения МП;
- Отсутствие необходимости в точной ориентации антенн;
- Возможность использования слабонаправленных антенн (широкая зона
обзора);
- Возможность использования больших высот для носителя аппаратуры
РРТР и, следовательно, большая дальность действия.
Недостатки:
- Невозможность определения МП источника немодулированного колебания;
- Необходимость временной синхронизации между пунктами приема с
точностью до 10-8с;
- Зависимость точности от вида модуляции (лучше для остроконечной
АКФ модулирующего сигнала);
- Затраты времени на измерения. В отличие от пеленгатора, где результат
– пеленг, в РДС формируются выборки сигналов. Они передаются со всех
постов на общий пост вычисления координат, где определяются соответствующие
задержки, а по ним МП.
Для определения МП ИРИ с произвольными
видами модуляции более предпочтительны угломерные системы на основе
пеленгаторов.