2. Методы поиска и обнаружения сигналов по частоте.
2.1 Одновременный поиск (беспоисковый способ).
Реализуется с
помощью многоканального приемника. АХЧ Кфi(f) канальных полосовых фильтров с
полосой Dfi, примыкая друг к другу,
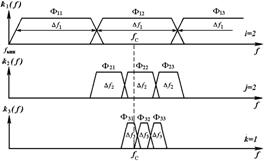
перекрывают диапазоны разведки Dfp (рис.3)
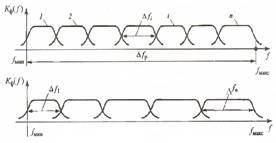
Рис.3 Полосы пропускания канальных
фильтров беспоискового приемника
Показатели способа: коэффициент перекрытия
фильтра ![]() ; диапазон разведываемых частот
; диапазон разведываемых частот ![]() или
или ![]() ; максимальная ошибка измерения несущей частоты
; максимальная ошибка измерения несущей частоты ![]() ; среднеквадратическая ошибка
; среднеквадратическая ошибка![]() ; число канальных фильтров
; число канальных фильтров ![]() ; разрешающая способность
; разрешающая способность ![]() . Обнаружение сигнала происходит практически мгновенно с
. Обнаружение сигнала происходит практически мгновенно с ![]() .
.
Частота
сигнала определяется частотой соответствующего фильтра.
Для
уменьшения числа каналов применяют фильтры, полоса прозрачности которых растет
с номером канала, а ![]() .
.
Пример реализации способа для
приемника прямого усиления приведен на рис.4
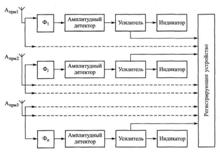
Рис.4 Структурная схема многоканального приемника
Отдельный приемный канал включает полосовой фильтр Фi, с крутыми срезами, амплитудный детектор, видеоусилитель и индикаторное устройство, с помощью которого фиксируется попадание сигнала в данный канал. Одна антенна может обслуживать несколько каналов. С помощью регистрирующего устройства осуществляется обнаружение сигналов на выходе каждого канала и регистрация частот обнаруживаемых сигналов.
Многоканальные приемники могут быть также построены по
схеме супергетеродина.
Многоканальные приемники применяют, как правило, в станциях общей обзорной разведки для грубого определения несущей частоты и типа разведуемого РЭС. Число каналов в них может достигать несколько десятков, а иногда и сотен. Основное достоинство многоканальных приемников - их простота и надежность. Применение микроэлектронной элементной базы позволяет создавать многоканальные структуры с очень большим количеством каналов при малых габаритах, весе и потреблении энергии.
Модификацией многоканального является матричный приемник, позволяющей существенно сократить число каналов, обеспечив высокие показатели по точности измерения частоты и разрешающей способности.
Структурная схема матричного приемника содержит п столбцов по т строк в каждом (рис. 5).
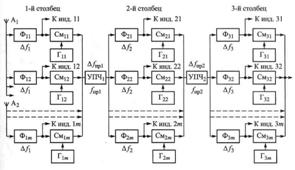
Рис. 5- Структурная схема матричного приемника
АЧХ фильтров Определение частоты
2.2 Последовательный поиск по частоте.
Просмотр заданного диапазона частот
производится периодически, обычно по пилообразному закону (рис.6).
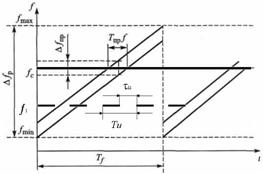
Рис.6 Пояснение поискового способа
определения несущей частоты
Радиосигнала.
Основные характеристики способа:![]() - диапазоны
разведываемых частот;
- диапазоны
разведываемых частот;
![]() - полоса пропускания приемника;
- полоса пропускания приемника;
![]() - период перестройки;
- период перестройки;
![]() - время приемного
сигнала на фиксированной частоте;
- время приемного
сигнала на фиксированной частоте;
![]() - скорость
перестройки;
- скорость
перестройки;
![]() - разрешающая
способность по частоте;
- разрешающая
способность по частоте;
![]() - СКО измерения
частоты.
- СКО измерения
частоты.
Из физического смысла следует, что ![]() .
.
Если сигнал непрерывный, то его
обнаружение и измерение частоты происходит мгновенно с Р=1.
Обнаружение и измерение частоты
импульсного сигнала носит вероятностный характер.
Вероятность обнаружения импульсного
сигнала за один цикл перестройки приемника зависит от соотношения между ![]() и
и ![]() .
.
Различают три вида поиска:
медленный, быстрый и средний.
а) Медленный поиск. Условие ![]() Тпрf >Тu. В этом случае Робн=1
за время перестройки Tf при условии, что время облучения средства
разведки импульсами разведываемой РЭС не менее периода перестройки: Тобл³Тf . Это значит, что скорость
перестройки настолько мала, что за интервал времени Тпрf (частота разведываемого сигнала
пребывает в полосе пропускания) на вход приемника обязательно поступит хотя бы
один импульс tu РЭС или его часть, не меньшая, чем
tmin (постоянная времени переходных
процессов).
Тпрf >Тu. В этом случае Робн=1
за время перестройки Tf при условии, что время облучения средства
разведки импульсами разведываемой РЭС не менее периода перестройки: Тобл³Тf . Это значит, что скорость
перестройки настолько мала, что за интервал времени Тпрf (частота разведываемого сигнала
пребывает в полосе пропускания) на вход приемника обязательно поступит хотя бы
один импульс tu РЭС или его часть, не меньшая, чем
tmin (постоянная времени переходных
процессов).
Недостатки медленного поиска: большое время разведки, малая пропускная способность,
пропуск кратковременно работающих РЭС.
б) Быстрый поиск . Условие Tf < tu.Тогда Робн=1 независимо
от Тобн станции разведки сигналами РЭС. Это важное достоинство
быстрого поиска.
Скорость перестройки настолько
велика, что за время tu приемник успевает настроиться на
частоту сигнала и на его вход обязательно наступит хотя бы часть импульса, не
меньшая, чем tmin .
Для быстрого поиска скорость
перестройки обеспечивается до 104МГц/мкс и реализуется электронным
способом.
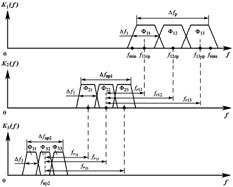
Скорость перестройки ограничивается
расширением и искажением формы динамической АЧХ, приводящей к ухудшению df, sf, чувствительности приемника
(рис.7).
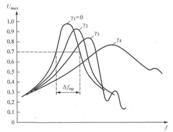
Рис.7 Динамическая АЧХ приемника с быстрой перестройкой.
в) Поиск со средней скоростью. Позволяет найти компромисс между скоростью и точностью
определения частоты. Условие поиска:
Tu>Tпрf>tu , при этом Робн<1
По аналогии с пеленгацией
вероятность обнаружения за время разведки tp=nTf (где n – число циклов перестройки)
определяется формулой:
![]()
Вывод: вероятность обнаружения возрастает при
увеличении tp, Dfпр и
уменьшении Dfp.
Реализация поискового способа возможна с помощью
перестраиваемых приемников прямого усиления или супергетеродинного.
В приемнике прямого усиления (рис. 8) применяют два синхронно перестраиваемых фильтра Ф1 и Ф2. Фильтр Ф1 ограничивает полосу пропускания приемника до полосы пропускания усилителя радиочастоты (УРЧ). Фильтр Ф2 ограничивает полосу пропускания после УРЧ, что приводит к существенному уменьшению мощности шумов с выхода УРЧ и, следовательно, повышению чувствительности приемника.
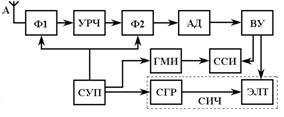
Рис.8 - Поисковый приемник прямого усиления.
Перестройка фильтров осуществляется с помощью схемы управления перестройкой (СУП). Эта же схема используется для введения данных о текущем значении частоты настройки фильтров в схему измерения частоты (СИЧ), которая состоит из схемы горизонтальной развертки (СГР) и электронно-лучевой трубки (ЭЛТ). При использовании в качестве индикатора ЭЛТ напряжение с выхода СУП запускает горизонтальную частотную развертку ЭЛТ. После детектирования сигнала с выхода Ф2 в амплитудном детекторе (АД) и усиления продетектированного сигнала в видеоусилителе (ВУ) он поступает на вертикальные отклоняющие пластины ЭЛТ. В результате на экране индикатора мы наблюдаем принятый сигнал и по его положению на частотной развертке определяем несущую частоту сигнала.
В качестве устройства измерения частоты может использоваться счетчик масштабных импульсов. В этом случае СУП запускает генератор масштабных импульсов (ГМИ), которые поступают к схеме счета импульсов (ССИ). Счет прекращается в момент поступления на ССИ сигнала с выхода ВУ. Показания счетчика будут пропорциональны частоте настройки фильтра, следовательно, соответствовать частоте принятого сигнала.
Супергетеродинный приемник состоит из усилителя радиочастоты (УРЧ) с входным фильтром, смесителя (СМ) с гетеродином (Г), усилителя промежуточной частоты (УПЧ), амплитудного детектора (АД), видеоусилителя (ВУ) и схемы измерения частоты (СИЧ), аналогичной приемнику прямого усиления (рис. 9).
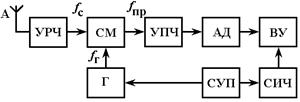
Рис.9 - Поисковый приемник супергетеродинного типа.
Смеситель с гетеродином образуют преобразователь частоты, который осуществляет перенос спектра радиосигнала с частотой fc на постоянную для данного приемника частоту fпр =|fc ±fг|. Спектр сигнала переносится в полосу пропускания УПЧ.
Настройка приемника на заданную частоту fc производится путем настройки гетеродина на частоту fг =fc ±fnp.
Основное усиление и избирательность полезного сигнала осуществляются УПЧ. К достоинствам супергетеродинного приемника относятся высокая избирательность и чувствительность. К недостаткам - сложность и наличие, кроме основного, побочных каналов приема (зеркальный канал, канал на fпр). Избирательность по зеркальному каналу улучшается путем использования настраиваемого входного фильтра Ф и УРЧ (преселекторов). Для уменьшения влияния помех на fnp используют заградительные фильтры.
Одной из задач, которые решают при ведении РР и РТР является определение местоположения (МП) источника электромагнитного излучения на плоскости или в пространстве.
Местоположение источников ЭМИ на плоскости определяется с помощью линий положения, а в пространстве - поверхностей положения.
Линией (поверхностью) положения
называют геометрическое место точек, для которого геометрическая величина,
определяющая возможное положение объекта (источника ЭМИ), имеет постоянное значение.
При реализации различных способов определения МП наиболее часто в качестве таких линий используются линии пеленга, а геометрической постоянной является угол между этой линией и направлением отсчёта. Линия пеленга это прямая, соединяющая средство разведки и источник ЭМИ.
В практике РРТР находят применение различные способы пеленгации. Причём, наиболее широко используются амплитудные и фазовые методы. Поэтому задачей настоящей лекции является рассмотрение сущности этих методов.