1. Способы ведения радиолокационной разведки и классификация бортовых
РЛС.
Установилась классификация БРЛС, приведенная на рис.1
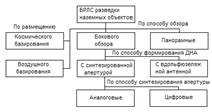
Рис.1 Классификация БРЛС.
Исторически первыми РЛС РЛР были панорамные. Они производили обзор путём кругового или секторного перемещения ДНА (Рис.2)
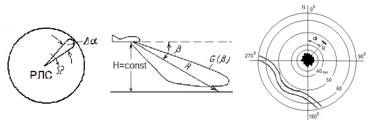
Рис.2 Панорамный способ ведения обзора.
Используется ДНА узкая
в азимутальной и широкая в угломестной плоскости. Отраженные сигналы,
приходящие с увеличенной задержкой при росте дальности производят яркостную
модуляцию луча радиальной или секторной разведки. Формируется яркостная
картина, соответствующая радиолокационному контрасту. Существенным недостатком
является низкая линейная разрешающая способность по азимуту, определяемая
шириной ДНА и дальностью до объекта  , где d
– горизонтальный раскрыв антенны, Д – дальность до объекта. Например, при d =2м, l
=3см, Д =100км, dДТ
=1.5км. Из-за этого метод находит ограниченное применение. Улучшение РС возможно
путем ¯l и
путем d , однако переход к ММВ связан с ¯Д из-за роста
ослабления в атмосфере, а рост d ограничен аэродинамическим требованиям.
, где d
– горизонтальный раскрыв антенны, Д – дальность до объекта. Например, при d =2м, l
=3см, Д =100км, dДТ
=1.5км. Из-за этого метод находит ограниченное применение. Улучшение РС возможно
путем ¯l и
путем d , однако переход к ММВ связан с ¯Д из-за роста
ослабления в атмосфере, а рост d ограничен аэродинамическим требованиям.
Найден принципиально иной способ обзора в РЛС БО. В полезный эффект обращено поступательное движение носителя как элемент формирования ДНА. Схема антенны сделана неподвижной. Причем, возможно её совмещение с самым протяженном размером носителя.
РЛС БО с вдольфезюляжной антенной ( ВФА)
Принцип обзора местности поясняется на рис.3
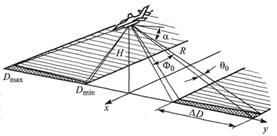
Рис.3 Принцип обзора местности РЛС БО с ВФА
Антенна устанавливается неподвижно вдоль фезюляжа так, что её луч ^ траектории полёта. Т.к. d ~ 15м, то при l =3см ширина ДНА db ~ 6угл.лин. Обзор осуществляется перемещением самолёта, а на индикаторе формируется изображение в координатах « наклонная горизонтальная дальность –у» -« путевая дальность – х». Разрешение объектов также производится по двум координатам. Найдём эти РС (Рис.4)
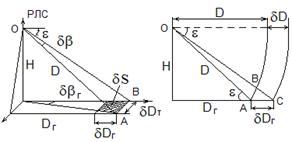
Рис.4 К пояснению
разрешаюших способностей
На рис.4: dД – разрешающая способность по наклонной дальности;
dДГ – РС по горизонтальной дальности;
dДГ – по путевой дальности;
Для импульсного режима работы РЛС:  .
.
Если ДГ>>dД и e<90о, то из D АВС:  (1)
(1)
с e (¯Д, Н = Const) ® dДГ – этим объясняется наличие непросматриваемой зоны ( Дmin ). с ¯ e ® d ДГ ® dД
Т.О. РС ВФА по горизонтальной дальности тем лучше, чем короче импульс и меньше e.
Из D ОАВ
(Рис.4,а):  , либо
, либо  (2)
(2)
с ¯e (Д ) ®dДТ ( ухудшается РС по путевой дальности )
Зависимость РС dДТ от Н и e приводит к невозможности использования РЛС ВФА на борту КА.
Пример: l =3см d =15cм Д =200км dДТ » 200м.
Зная dДГ и dДТ, получим одну из основных ТГХ РЛС БО
– разрешаемую площадь dS:  (3)
(3)
Значение S при определенных параметрах РЛС может быть весьма малым.
Функциональная схема РЛС ВФА показаны на рисунке 5.
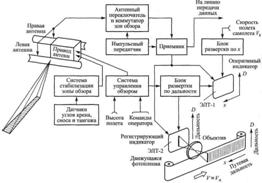
Рис.5 Функциональная схема РЛС ВФА
Отраженные сигналы после усиления и обработки модулируют по яркости луч индикатора (элтг). Развертка по дальности производится вдоль одной строки. Экран фотографируется на движущуюся плёнку. Отраженные сигналы в каждом периоде повторения создают на плёнке одну поперечную линию в координатах амплитуда (яркость) – дальность. Синхронное движение самолёта и плёнки создают кадр – РЛ-изображение.
Соотношение основных параметров РЛС ВФА:
Время облучения объекта:  , где V – путевая скорость.
, где V – путевая скорость.
Число отраженных импульсов:  ;
;
Яркость отметки объекта: Вц =k1 Ec =k1 ×NEc1 =k1k2NPc1, где Ec энергия пикета, Ec1, Pc1 – энергия и мощность одного импульса.
Но из уравнения радиолокации : 
Здесь Рп - мощность передатчика; G(e) = Gmax×F2(e) –коэффициент усиления антенны РЛС; F(e) –нормирована ДНА; sу – эффективная поверхность рассеяния цели (ЭПР).
ЭПР связана с разрешаемой площадью:
sу = sуд×ds = sуд×dДГ ×dДТ, где sуд = ¡оg(e). Здесь ¡о – коэффициент, характеризующий свойства поверхности;
G(e) » Cosm e) –нормированная диаграмма обратного рассеивания ( m = 1 при диффузном отражении.
Таким образом Вц = f [(парам. РЛС: Pn , Gm, F(e) , tи(Пи), k1, k2, dДг, dДТ); характеристики поверхности:¡о, g(e) )]
С точки зрения разведки выбор этих параметров должен обеспечивать максимальный контраст и детальность при заданной дальности. С точки зрения противодействия – наоборот. Возможности в этом отношении связаны с ¡о, g(e), знанием dДГ, dДТ, dД для правильной маскировки, создания ложных отметок и помех.
2. Зондирующие и
отраженные сигналы при ведении РЛР наземных объектов.
Вид и характеристика ЗС определяются назначением и требованиями к БРЛС. Общие требования к ЗС.
- Энергия ЗС должна обеспечивать обнаружение объекта на требуемой Д с заданным качеством;
- Характеристики модуляции должны обеспечивать требуемые РС dД, dДГ, dДТ, dV и точности, а также помехозащищённость.
В силу противоречивости требований в БРЛС могут использоваться несколько видов ЗС.
Наиболее общей характеристикой сигнала, определяющей РС и точности является двумерная АКФ. Её обобщенный вид:

Здесь 
![]() - комплексная огибающая отраженного
сигнала;
- комплексная огибающая отраженного
сигнала;
![]() - комплексно-сопряжённая
огибающая импульсной характеристики согласованного фильтра.
- комплексно-сопряжённая
огибающая импульсной характеристики согласованного фильтра.
t, W8 – временной (запаздывание) и доплеровский сдвиги отраженного сигнала.
Модуль нормированного значения АКФ  называют функцией
неопределённости (ФН).
называют функцией
неопределённости (ФН).
Рельеф этой функции – телом неопределенности (ТН)
Сечение ТН горизонтальной плоскости для r = 0.5 даёт диаграмму неопределенности . Сечение вертикальными плоскостями r(t, о) и r(о,W) даёт соответственно огибающую АКФ на выходе СФ S(t) и огибающую спектра G(W). Результаты расчёта ДН для типовых сигналов приведены в таблице.
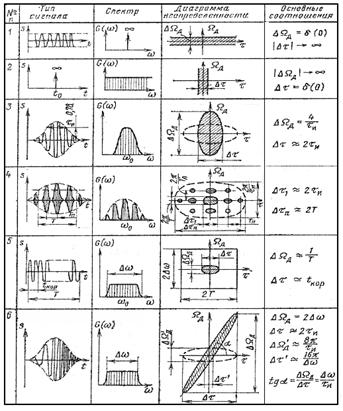
Характеристики основных радиолокационных сигналов
Первые три
сигнала – непрерывный гармонический, d -импульс
и радиоимпульс с колокольной огибающей относятся к узкополосным. Для них база
сигнала  . Первый и второй сигналы не обеспечивают одновременное
разрешение по дальности и скорости (dV @ dWg) Третий обеспечивает одновременное
разрешение по Д и V, но
стремление ¯dД
путём ¯tu приводит к ухудшению РС по V (т.к.
dWg). Если не стоит
задача обнаружения движущихся объектов, то этот сигнал был бы приемлем для
РЛС ВФА.
. Первый и второй сигналы не обеспечивают одновременное
разрешение по дальности и скорости (dV @ dWg) Третий обеспечивает одновременное
разрешение по Д и V, но
стремление ¯dД
путём ¯tu приводит к ухудшению РС по V (т.к.
dWg). Если не стоит
задача обнаружения движущихся объектов, то этот сигнал был бы приемлем для
РЛС ВФА.
Однако стремление ¯dДТ за счёт
¯tu приводит к ¯Pu , значит и к ¯Д, т.к.  (мощность передатчика ограничена).
(мощность передатчика ограничена).
Выход в примечании ШПС, для которых база пutu >>1. Это сигнал 4,5,6 виден (когерентная пачка радиоимпульсов, фазоманипулированный импульс и ЛЧМ-импульс. Эти сигналы обеспечивают одновременное независимое высокое разрешение по Д и V при требуемой мощности сигнала. Однако для 4го вида из-за многоликовости ТН возможна неоднозначность отсчёта Д и V. Сигнал 5 вида имеет кнопочное ТН в виде центрального узкого по осям t и Wg пика и пьедестала, состоящего из множества мелких пиков. Именно они, суммируясь от отдельных участков земной поверхности, могут маскировать центральный пик от объекта.
Этого недостатка
лишен ЛЧМИ. Его ТН сосредоточено в одиночном гребне,
повернутом относительно осей. Для ЛЧМИ
РС по Д определяется
длительностью сжатого в СФ импульса  , а Рu и РС
по V - длительностью не
сжатого импульса:
, а Рu и РС
по V - длительностью не
сжатого импульса: , а tu >>tсж . В РЛС
ВФА используется ЛЧМИ, СФ строится на основе линий задержки на ПАВ.
, а tu >>tсж . В РЛС
ВФА используется ЛЧМИ, СФ строится на основе линий задержки на ПАВ.